RAPIROをBYOB,Scratch,Etoysで動かす
RAPIROを動かす場合,やはりケーブルフリーで動かしたいのですが,そのためには,Raspberry Piを搭載して無線LAN経由で操作する必要があります。Raspberry Piを用意できない場合は,PCとRAPIRO上のArduinoとケーブル接続で動かすことになります。
このページでは,RAPIROにRaspberry Pi(以下RasPi)を搭載して無線LAN経由でPC上のBYOB(Scratch)から制御する場合(以下無線LAN接続とよぶ)とPCとRAPIRO(Arduino)をUSB接続してシリアル通信でPC上のBYOB(Scratch)で制御する場合(以下USB接続とよぶ)の2つの場合について説明します。なお,RAPIRO上のArduinoにはSample Programはインストールされているものとします。(RAPIROを保有している人は行っているはずなので説明は省略します。)
Etoysを使う方法はEtoysで動かすを読んで下さい。
Mathematicaで動かす方法も追加しました。(2014.06.15追加)Mathematicaで動かす
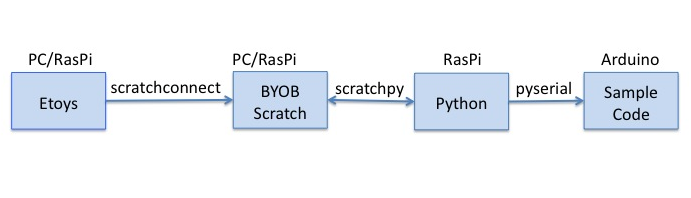
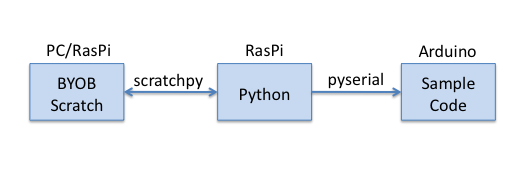
基本的なメッセージの流れ(無線LAN接続の場合)
用意するもの
無線LAN接続の場合
ここでは,PC上でBYOBを動かすことにしていますが,RasPi(Raspbian)上でBYOBを動かすこともできます。Raspbian上でBYOBを動かす方法はBYOBをRaspberry Piで動かすを参照して下さい。
USB接続の場合
- RAPIRO
- Arduinoとシリアル通信可能かつPythonプログラムが実行可能なPC(Windows, Mac OS X, Linux いずれも可)
- BYOB3.1.1またはScratch1.4
Mac OS XとLinuxの場合はあらかじめPythonの実行環境がありますが,Windowsの場合は各自Pythonの実行環境を用意する必要があります。詳しくはWindows で Python を使う — Python 2.7ja1 documentationを参考にしてください。
準備
インストール
無線LAN接続の場合は,以下の作業をPCからsshでRasPiにログインして行います。USB接続の場合はPCで行います。無線LAN接続の場合は予めRasPiのIPアドレスを調べておいてください。PCからはユーザpiを変更していない限り
ssh -l pi <IP address>
でログインすることができます。
注意:scratchpyと同様の機能のscratchというPythonモジュールがあります。こちらでも使えますが,下記のPythonプログラムを書き換える必要があります。
設定
- Pythonの実行ファイル
無線LAN接続の場合は,以下の作業をPCからsshでRasPiにログインして行います。USN接続の場合はPCで行います。
次のファイル(ここではrapiro.pyとする)を作成します。
無線LAN接続の場合はhostはPCのIPアドレス,USB接続の場合はlocalhostですが,hostを記載しなければデフォルトでlocalhostになります。scratchpyの説明を参照して下さい。このファイルでは,IP アドレスが192.168.0.2のPCでBYOB(Scratch)を起動している設定になります。
USB接続の場合は/dev/ttyAMA0を変更します。変更する名前はArduino IDEを使用しているときと同じものにします。Scratchの場合はこちらを参照願います。
#####
import scratch
import serial
ser = serial.Serial('/dev/ttyAMA0', 57600, timeout=1)
com = scratch.Scratch(host='192.168.0.2')
try:
while 1:
msg=com.receive()
if msg[0] == 'broadcast':
print(msg[1])
ser.write(msg[1])
elif msg[0] == 'sensor-update':
pass
else:
pass
except KeyboardInterrupt:
ser.write("#M0")
ser.close()
com.disconnect()
#####
- BYOB/Scratchの設定
BYOB3.1.1を使用する場合は,共有から「メッシュのホストになる」をクリックします。
Scratch1.4を使用する場合は遠隔接続センサーを有効(remote sensor connections を enable)にします。
- Pythonプログラムの実行
無線LAN接続の場合はRAPIROにsshでログインして,上記のrapiro.pyを実行します。
python rapiro.py
USB接続の場合は,PCで実行でします。
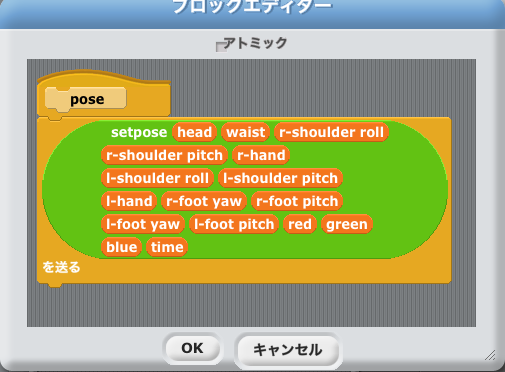
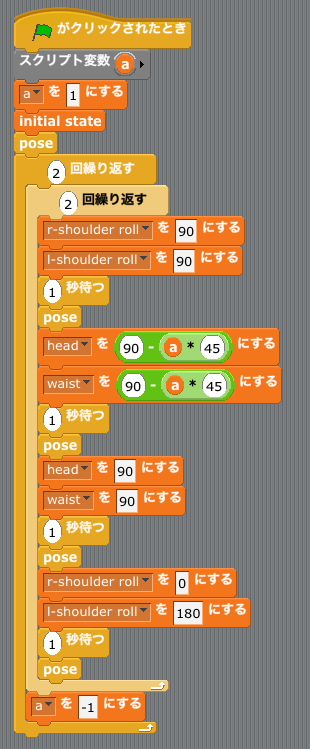
BYOB(Scratch)のスクリプト作成
BYOBのブロック作成機能を利用した方がわかりやすいので,ここではBYOBを使用します。ブロック作成機能を使うことを除けば,Scratchでも同様にできます。
上記のブロックを作成したものです。rapiro.ypr
Scratchを使用する場合の工夫
Scratchを使用する場合はブロックを作成することができないので,次の様なPythonのファイルを利用してScratchからのメッセージ送信を簡単にするのがよいと思います。Pyonkeeを使うこともできます。
#####
#coding: utf-8
import scratch
import serial
ser = serial.Serial('/dev/ttyAMA0', 57600, timeout=1)
com = scratch.Scratch(host='192.168.1.15')
try:
while 1:
msg=com.receive()
if msg[0] == 'broadcast':
if msg[1] == '前':
ser.write("#M1")
elif msg[1] == '右':
ser.write("#M4")
elif msg[1] == '左':
ser.write("#M3")
elif msg[1] == '後':
ser.write("#M2")
elif msg[1] == '止':
ser.write("#M0")
else:
pass
elif msg[0] == 'sensor-update':
pass
else:
pass
except KeyboardInterrupt:
ser.write("#M0")
ser.close()
com.disconnect()
#####
Scratchでは,前後左右止の文字をメッセージ送信することでRapiroを動かすことができます。Pause命令についてもPythonファイルを工夫することで,Scratchのメッセージ送信を楽にすることができます。
Etoysで動かす
Etoys単独でメッセージ送信する方法が現状なさそうなので,BYOBかScratchを踏み台にします。BYOBやScratchで作成したプログラムをEtoysからのメッセージ送信で起動してもよいですし,BYOBやScratchは単なる中継地点と考えて,EtoysのみでRAPIROを動かすための命令を送信してもよいです。
ScratchConnect
Etoysからメッセージを送信するには,横川さんのScratchConnectを使います。現在Etoys5に含まれているScratchConnectはブロードキャストのタイルを使う時に不具合があるので,最新のScratchConnect-ky.6.mczを
SqueakSourceからダウンロードします。
ダウンロードしたmczファイルをEtoysのデスクトップにドラッグアンドドロップして,load versionを選びます。
このままだと,scratchpyでメッセージをパースするときにエラーがでるので,EtoysでSystem Browserを開いて,
ScratchConnect-Etoys->ScratchClientMorph->scratch->broadcast:
を選んで,一番最後のクゥオーテーション'の前にあるスペースを削除します。(Pythonモジュールとしてscratchpyではなくscratchを使うとこの作業はしなくてもよくなります。)
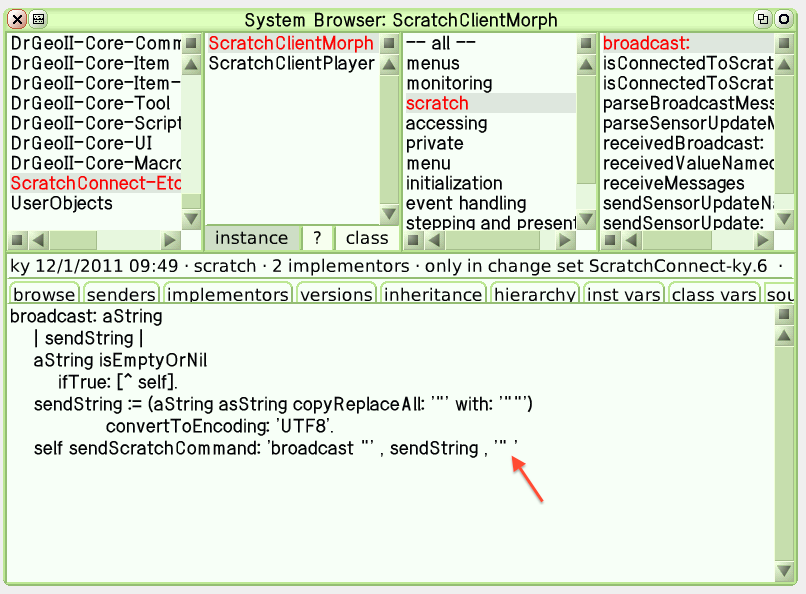
削除した後はacceptして,イメージを保存します。
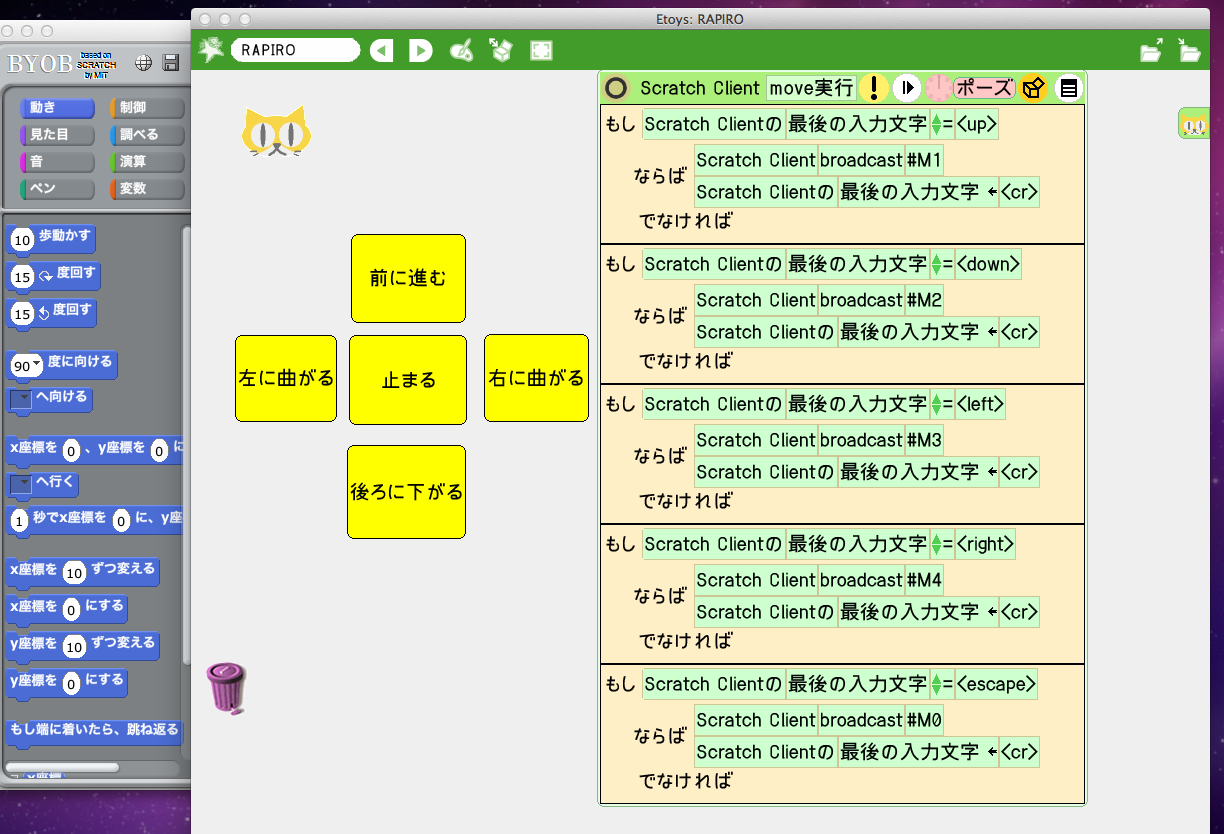
これでEtoysを使う準備ができました。オブジェクトのカタログの中にScratch Clientがあるので,それを取り出します。BYOBでHost Meshを実行後に,rapiro.pyを実行し,ScratchClientをダブルクリックします。後は,つぎのようなスクリプトをチクタクさせるか,ボタンを作成するとよいでしょう。Poseコマンドも同様に送信できます。
なお,RasPiで動くEtoysとしては,蜂須賀さんが公開しているEtoys-To-Go-5.0があります。「やっぱスクイーク(Squeak)が好き!」へようこそ!- 注)タイトルは気分で変更されます。 - PukiWikiからダウンロードできます。
Mathematicaで動かす
Raspberry Pi上のMathematicaを起動して,次の式を評価します。
serial = DeviceOpen["Serial", {"/dev/ttyAMA0", "BaudRate" -> 57600}];
次に#M1などの命令を送ります。その他Poseコマンドも同様に送信できます。
DeviceWriteBuffer[serial, {"#M1"}];
参考サイト
2014.11.15 Pyonkeeについて付記
2014.11.1 scratchpyと書くべきところをpyserialと記載したミスを修正
2014.10.16 Raspberry PiにBYOBをインストール方法を別ページに移動した。またコードの表示を見やすくした。
2014.10.14 Raspberry PiにBYOBをインストール方法をリンクではなく直接記載
2014.6.15 最初の説明の修正とMathematicaで動かす方法を追加しました。
2014.5.30 rapiro.yprへのリンクを分かりやすい場所に作りました。
2014.5.8 Scratchを使用する場合の工夫を追記
2014.4.7 表示・誤字の修正とWindows上のPython環境の情報を追記
2014.4.4 公開